

 hab mir mel ne kleine cnc gebaut
hab mir mel ne kleine cnc gebaut
abmessung:
550x350xca500
arbeitsraum:
300x190x110
schrittmotoren habe 1Nm , für 12euro von www.edel-schrott.de . kann ich nur empfehlen den haendler
endstufe hat 4A / 40 V mein netzteil hat aber nur 25.. reicht aber…
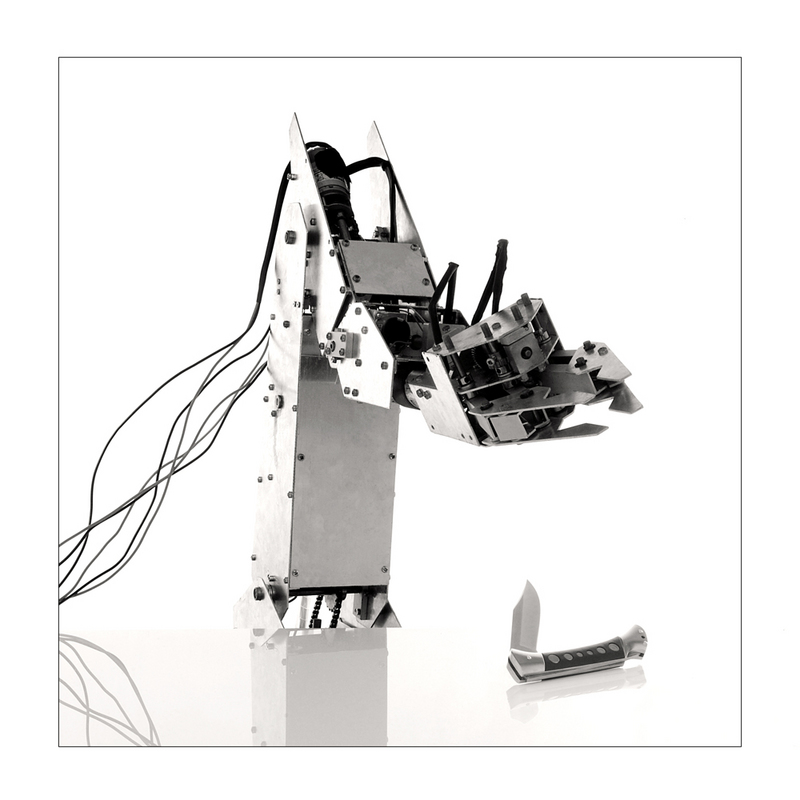
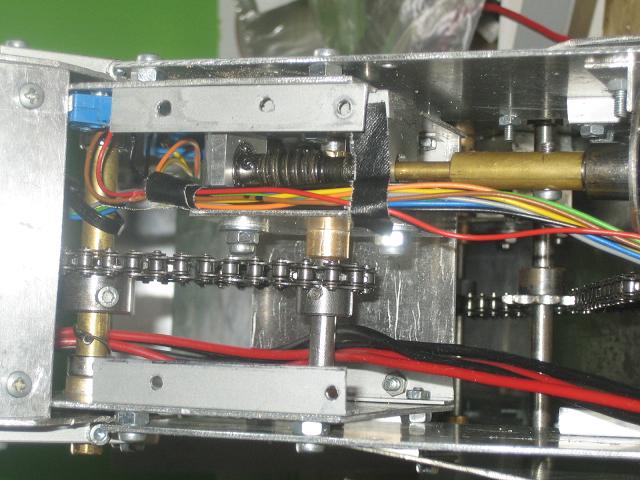
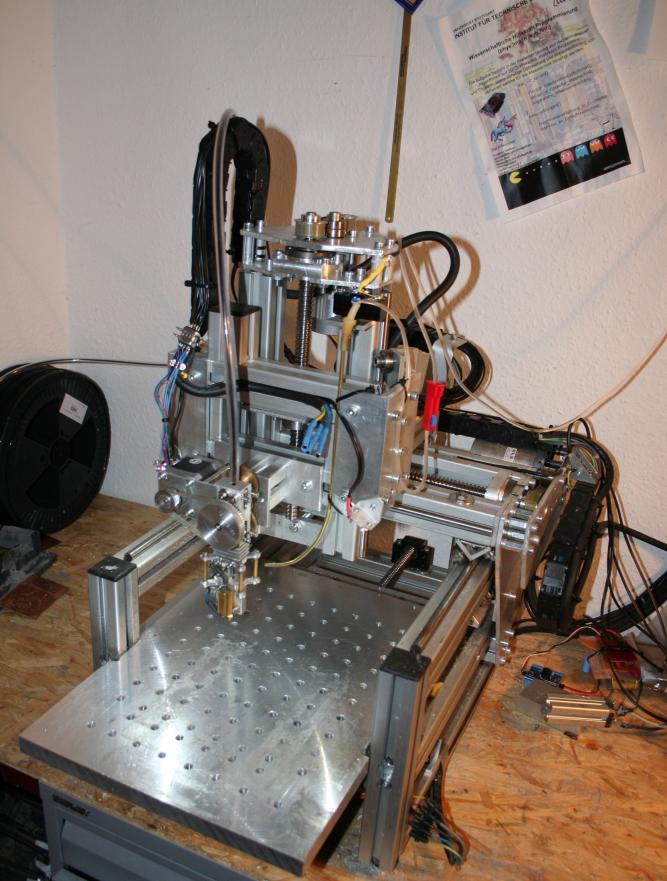
so sieht das ganze aus: klicken für grösseres bild
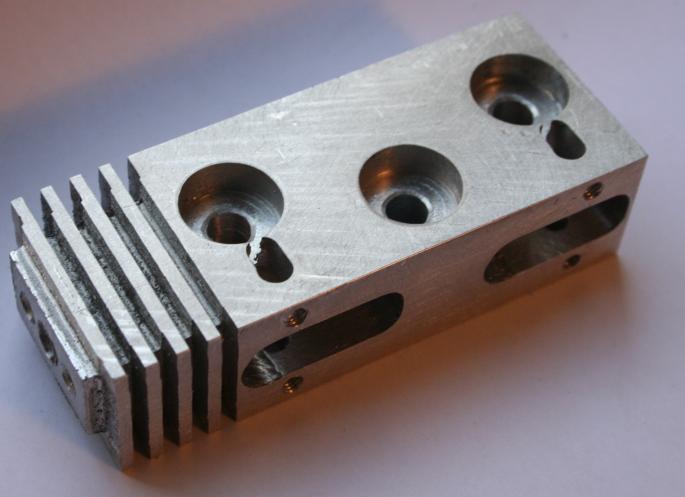
hier mal ein Frästeil:
hier gibts noch bilder von der bauphase und im roboternetz noch viel mehr dazu…
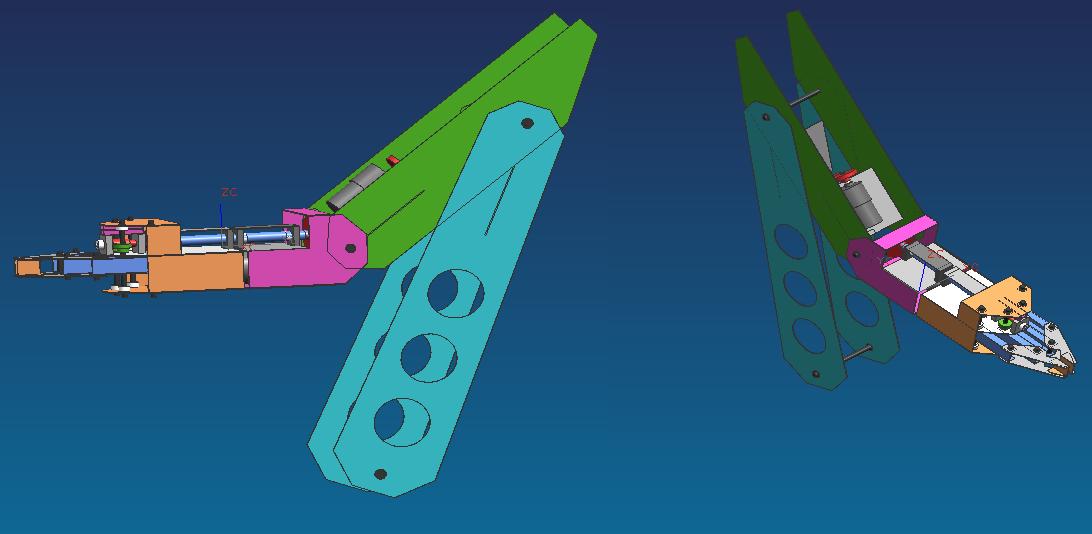
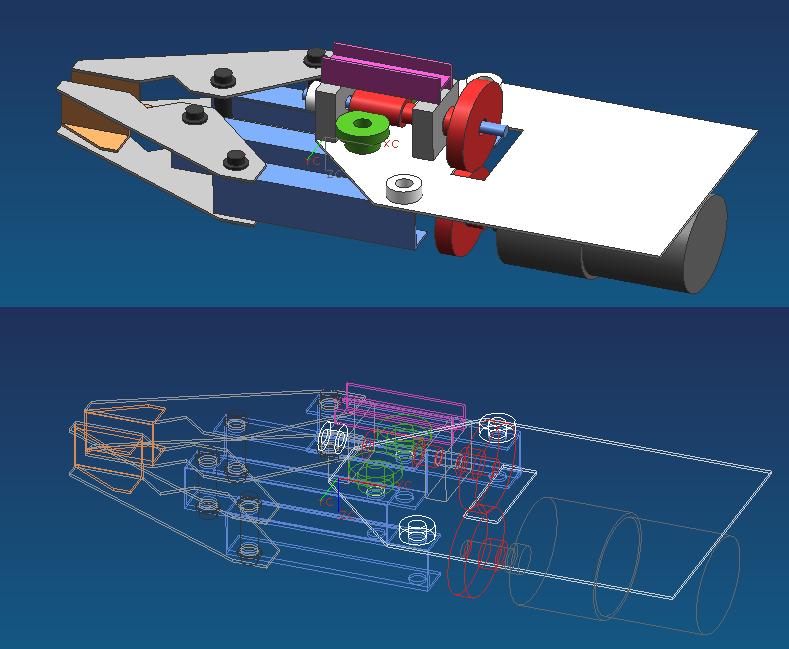
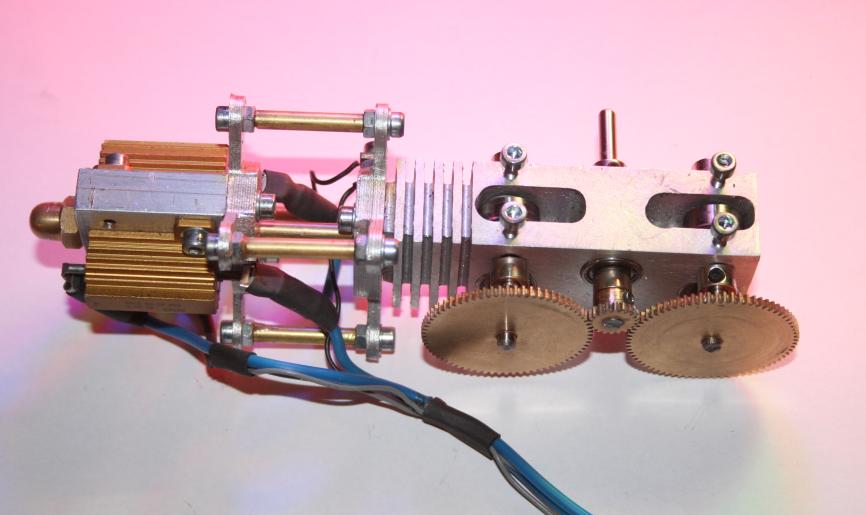
um das ganze noch als 3D drucker nutzen zu können, habe ich dann noch einen extruder gefräst. siehe auch hier:
http://www.thingiverse.com/thing:3985
das ganze läuft mit reprap elektronik und software… www.reprap.org