







cfk gehause fuer quadrocopter
Schreibe eine Antwort
erstes quadrocopter project.
hier erst mal ein paar bilder:

technische details:
prozessor:
– atmega644 fuer flugregelung
sensoren:
– 3 gyroskop sensoren
– 3-achsiger beschleunigungssensor
– luftdrucksensor (hoehenmessung)
energieversorgung
– 3200mAh LiPo
das ist der schaltplan dazu (Version 4.0 ) (pdf datei)
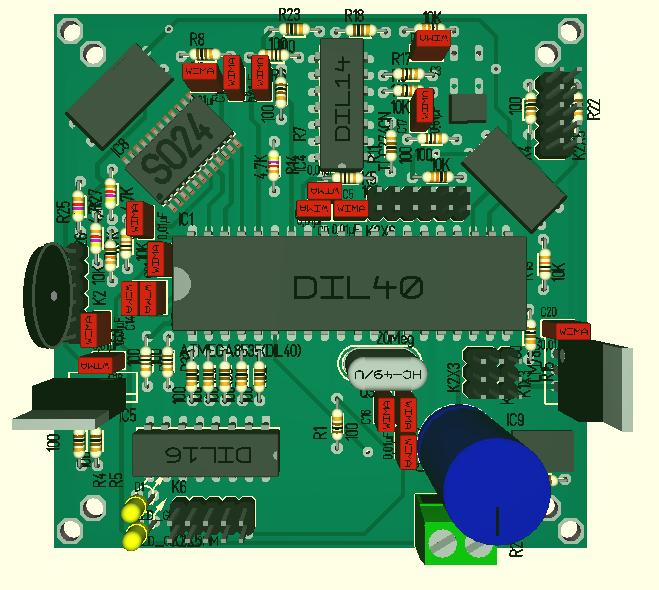
das board hat ausgaenge fuer 2 servos, (um die kamera zu schwenken), 6 schaltausgaenge ( gehn theoretisch auch fuer servos, oder kamerausloseser, fallschirm oder was man sonst damit anstellen will) und nochmal 5 leistungsschaltasugaenge, z.b fuer positionsleuchten…
die software ist in bascom
forenthrads im roboternetz zum copter allgemein , sowie im
x-ufo forum zum copter und zum gehause ,da kann man auch noch ein wenig nachlesen.
das neue gehause ist aus cfk laminiert und sieht ungefaehr so aus:
das war mal der erste entwurf.
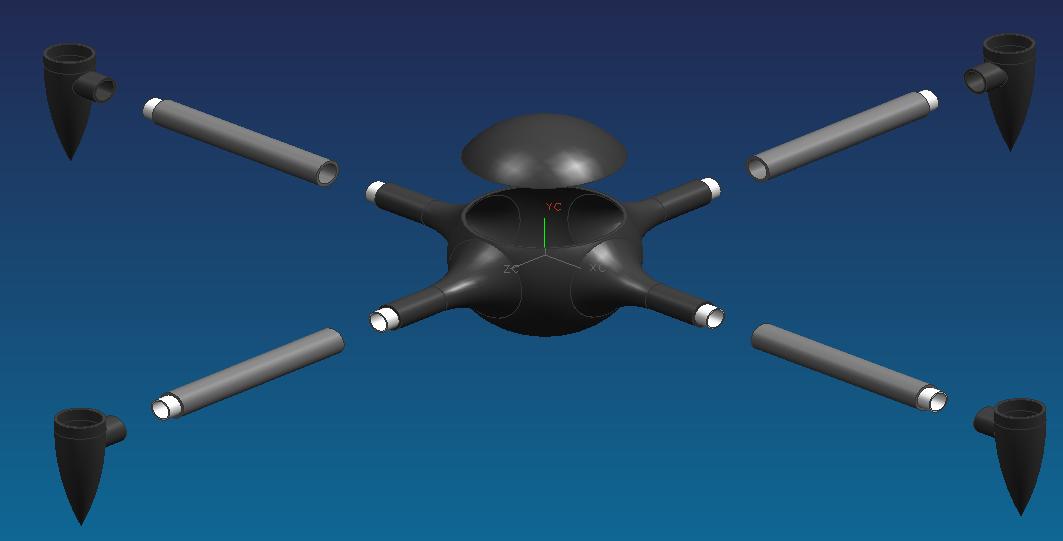
laminiert aus gfk:

und mit auslegern zusammen in cfk sieht das ganze dann so aus:



:) hab doch vorehr erst die wohnung geputzt ;)