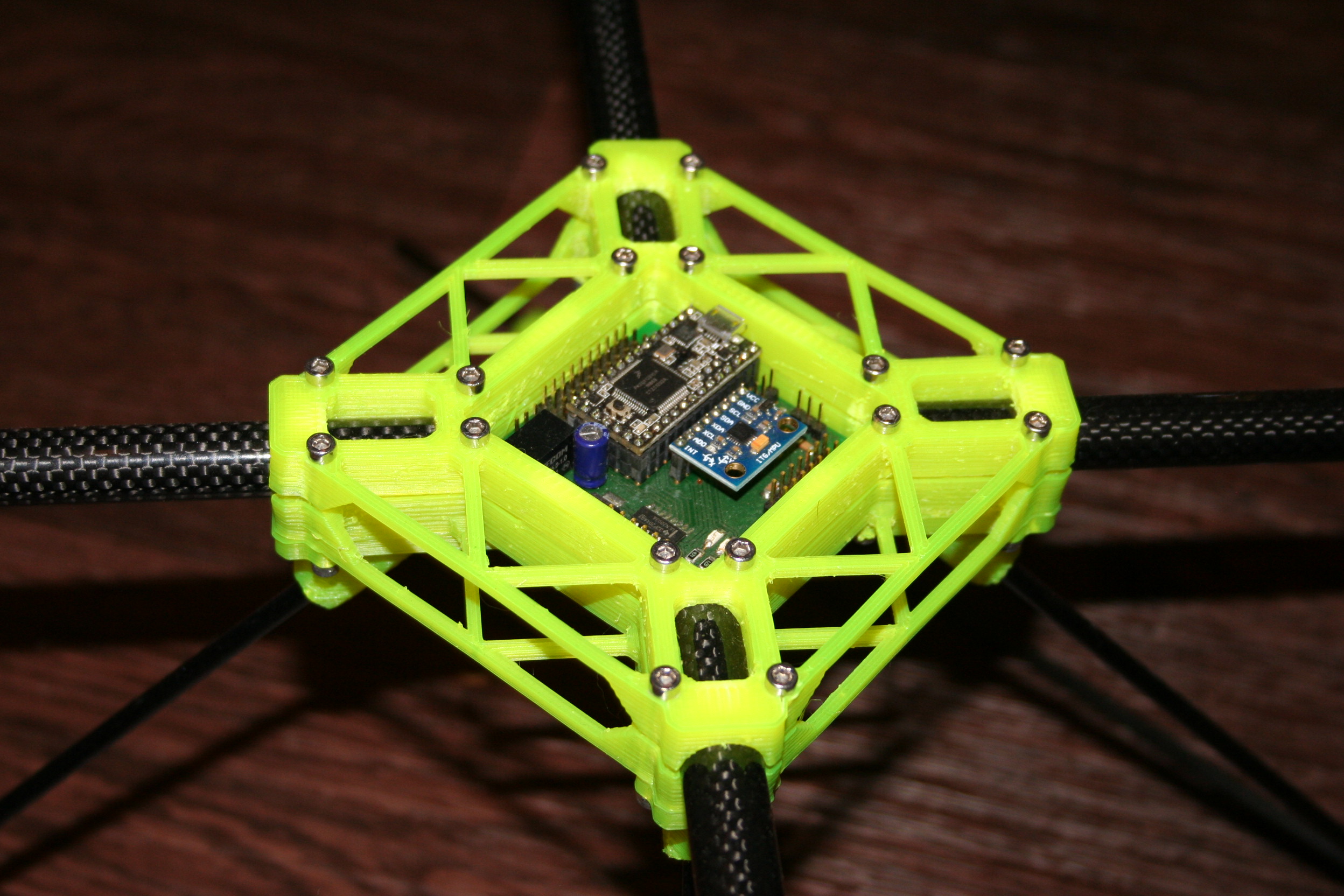
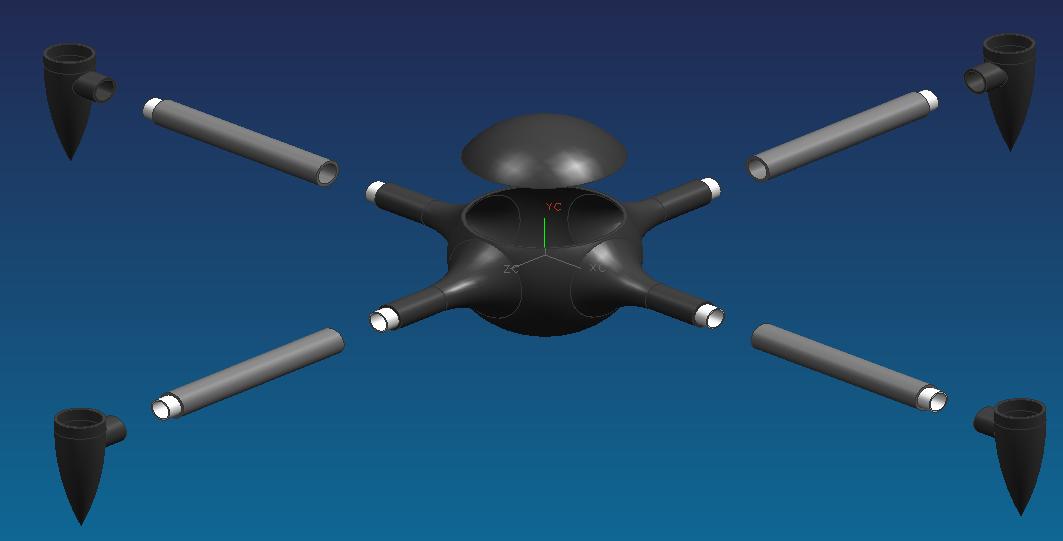
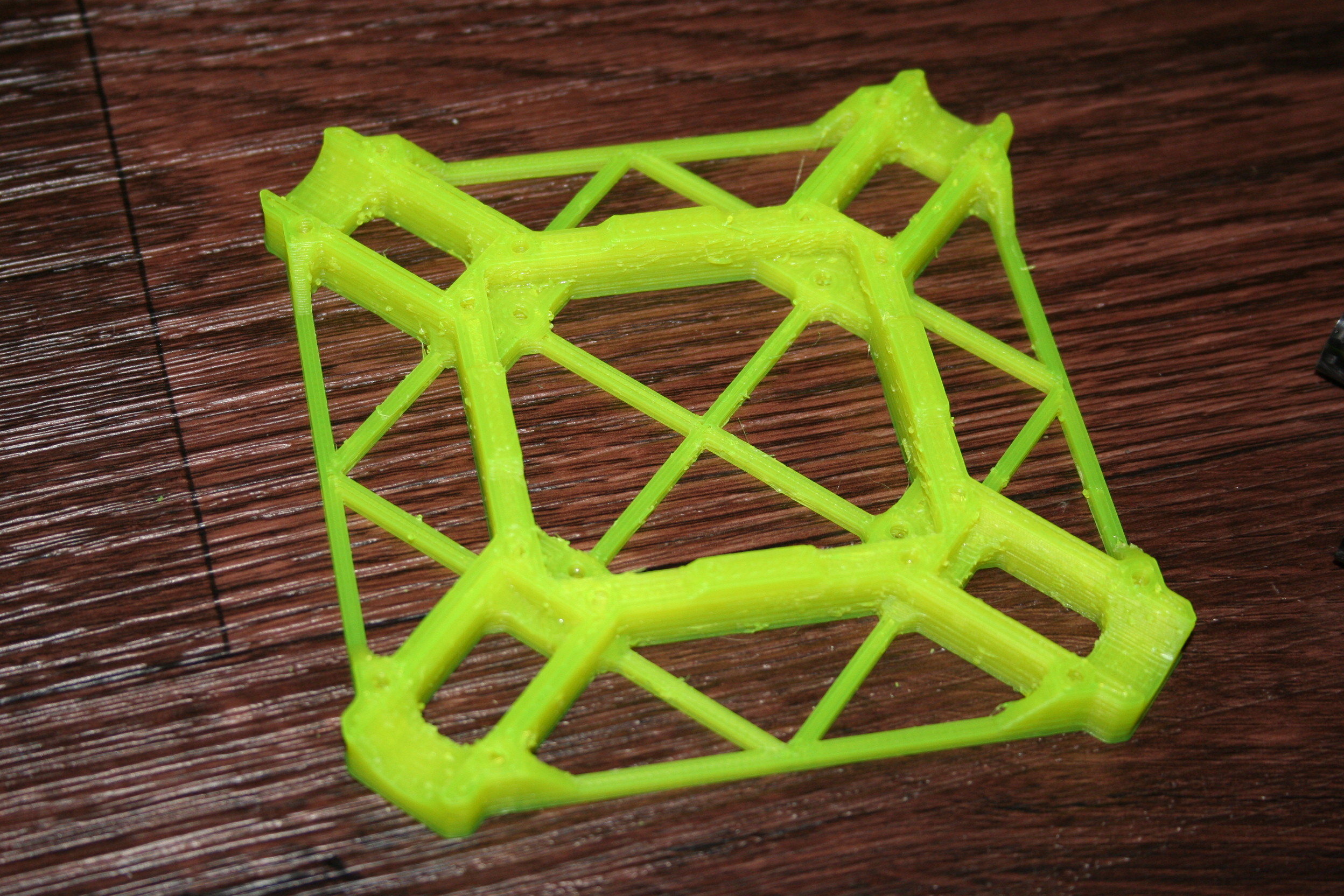
hier ein neues quadrocopter projekt. ist erst mal ein schnell konstruierter gedruckter rahmen um die elektronik / software zu testen. wenn die flugregelung und sonstige elektronik funktioniert gibt es dann ein laminiertes cfk upgrade, aber beim debuggen ist es erst mal ganz gut wenn kein gehaeuse vorhanden ist. der rahmen besteht aus cfk roehren, sowie 3d-gedruckten teilen.

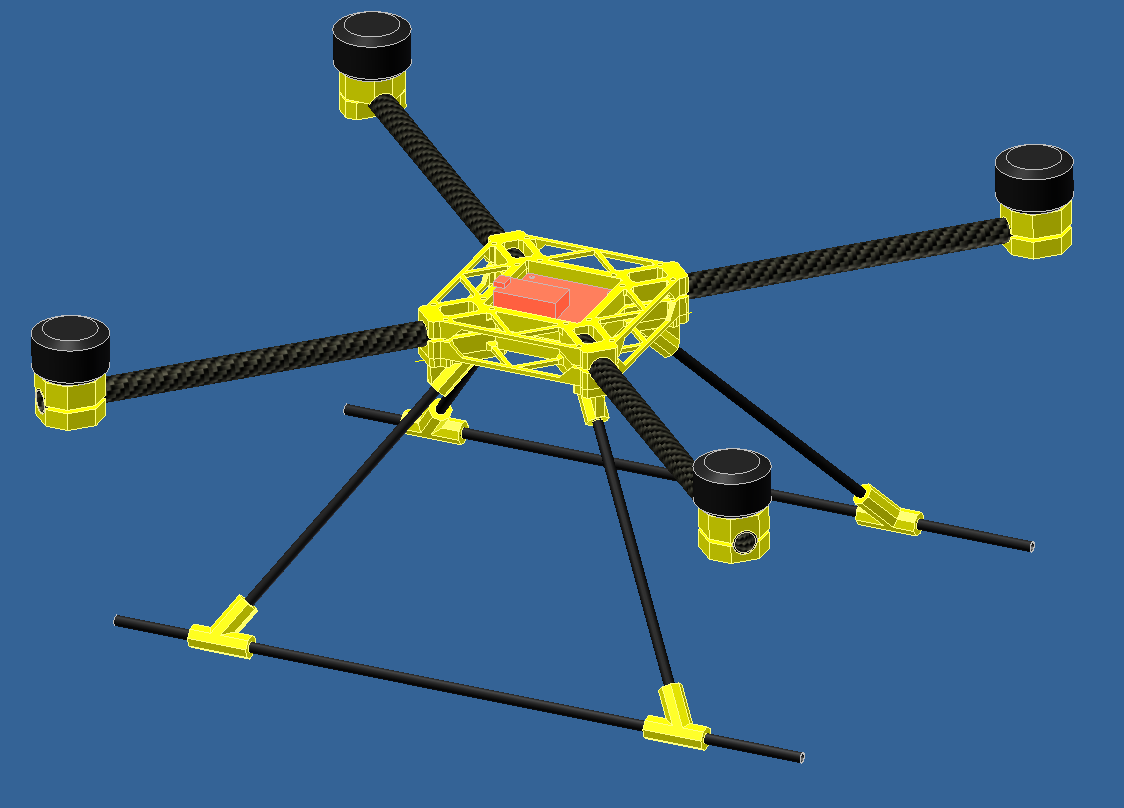

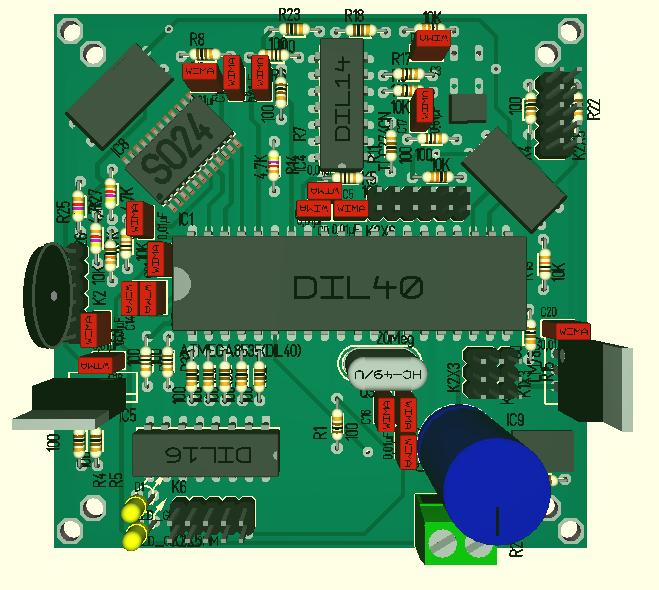
die elektronik besteht aus einem teensy 3.0 board auf einer kleinen platine mit MPU6050 gyroscop und acc einem darlington array fuer led spielereine, einem input fuer spektrum satellite empfaenger sowie extension header fuer navi und spaetere erweiterungen.